Flera, lite besvärligare,
bivillkor
Följande exempel kommer inte från en föreläsning
och det är inkluderat bara för att visa hur man kan vara
tvungen att formulera om sitt problem och hur man paketerar flera
bivillkor.
Problem:
Låt f(x1, x2) = 0.4
sin(3 x1 x2 + x2) + 1.
Minimera f(x1, x2)
då (x1, x2)
tillhör området som ges av |x1| + |x2| <= 1 och |x2| <= x1^2.
Steg 1: karakterisera
objektfunktion och bivillkor
Objektfunktionen är ickelinjär. Vi får samma
minimipunkt (men inte samma minvärde) med sin(3 x1 x2 + x2), men vi
behåller ursprungsformuleringen (0.4 och 1 är valda så
att plotten skall bli snygg). Bivillkoren liknar inte de i våra
föregående exempel. Vi vill avlägsna beloppen eftersom
de ger hörn. I dokumentationen för fmincon står
nämligen:
fmincon
is a gradient-based method that is designed to work on problems where
the objective and constraint functions are both continuous and have
continuous first derivatives. function with continuous first and second
derivatives because the algorithm uses gradient-based methods.
Steg 2: skriv objektfunktion
och bivillkor på standardform
Objektfunktionen är redan på standardform. Bivillkoren
kräver lite arbete dock. En av övningarna i Adams går
ut på att rita mängden som definieras av |x1| + |x2| <= 1, och det
visar sig bli en roterad kvadrat med kantlinjer x1 + x2 = 1, -x1 + x2 = 1, -x1 - x2 = 1
samt x1 - x2 = 1. Efter
lite tänkande ser man att villkoren blir:
x1 + x2 <= 1
-x1 + x2 <= 1
-x1 - x2 <= 1
x1 - x2 <= 1
De ickelinjära villkoren kan vi skriva som två
villkor x2 <= x1^2 och -x2 <= x1^2. Standardformen
lyder c(x) <= 0,
där c är en
funktion som definierar ett bivillkor, så i vårt fall:
-x1^2 + x2 <= 0
-x1^2 - x2 <= 0
Steg 3:
förpackning; vi inför de vektorer och matriser som
behövs för att definiera objektfunktion och bivillkor
Vi inför först x
som vektorn som lagrar variablerna, x1 och x2.
Olikhetsbivillkoren definieras av en matris
A och en kolonnvektor B, där A * x <= B, en rad per
bivillkor. Matrisen A har fyra rader (fyra
bivillkor) och två kolonner (två variabler) och ser ut som
följer:
|
[
|
1
|
1
|
]
|
|
|
[
|
1
|
]
|
A =
|
[
|
-1
|
1
|
]
|
|
B =
|
[
|
1
|
]
|
|
[
|
-1
|
-1
|
]
|
|
|
[
|
1
|
]
|
|
[
|
1
|
-1
|
]
|
|
|
[
|
1
|
]
|
Det ickelinjära bivillkoret definieras via en funktion, precis som
i föregående exempel, [in_eq,
eq] = constr_fun(x). Skillnaden är att vi nu har
olikhetsbivillkor och dessutom två stycken. Vi returnerar
avvikelserna som en kolonnvektor.
in_eq
= [-x(1)^2+x(2); -x(1)^2-x(2)];
Eftersom vi inte har något likhetsbivillkor
sätter vi eq till en
tom variabel []. Om vi hade flera likhetsbivillkor hade vi analogt
returnerat en vektor av avvikelser från bivillkoren.
Steg 4: skriv Matlabkoden
Jag har valt att lägga de tre rutinerna i en fil .
function ex3
A = [1 1; -1 1;
-1 -1; 1 -1]; % fyra linjära
olikhetsbivillkor
B = [1; 1; 1;
1];
A_eq =
[];
% inget linjärt likhetsbivillkor
B_eq = [];
LB =
[];
% inga enkla gränser
UB = [];
x_guess = [-0.1; 0.6];
[x_opt, obj_val] =
fmincon(@obj_fun, x_guess, A, B, A_eq, B_eq, LB, UB, @constr_fun)
function obj_val = obj_fun(x)
obj_val = 0.4 * sin(3 * x(1) *
x(2) + x(2)) + 1;
function [in_eq, eq] =
constr_fun(x)
in_eq = [-x(1)^2 - x(2); -x(1)^2
+ x(2)]; % ickelinjära
olikhetsbivillkor
eq =
[];
% inget ickelinjärt
likhetsbivillkor
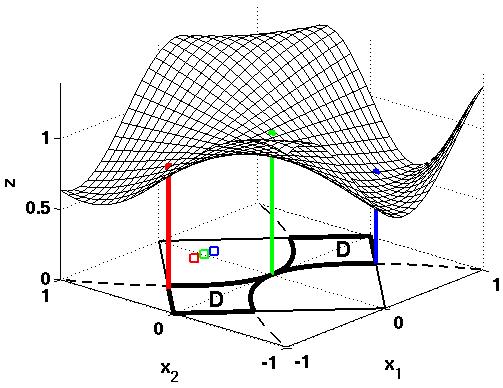
Följande bild visar några av problemets egenskaper. De tunna
linjerna i x1-x2-planet visar randen till |x1| + |x2| <= 1 och de
streckade linjerna visar analogt randen för |x2| <= x1^2. De tjocka
linjerna visar randen för D, det område vi minimerar
över. Beroende på var man startar hittar rutinen olika
punkter. Om vi startar i den röda kvadraten hamnar vi i den punkt
som markerats med en röd stolpe (jag har dragit upp stolpen till
ytan, så att man enklare skall se var på ytan man hamnar).
Notera att punkten ligger på randen (utan bivillkor hade vi inte
haft lokalt minimum här). Analogt för de andra kvadraterna.