Kvadratur och interpolation
Matlabs quadl ðr en
bra rutin som ðven kan hantera enklare
ðndpunkts-singulariteter. Om singulariteten blir f—r uttalad
ger quadl ett
felmeddelande och svaret blir mindre bra. SÍ hðr kan det se
ut (jag har tagit bort varningen f—r nolldivision). Toleransen
ðr 1e-6 absolut.
>> fel = quadl(@(x) 1 ./
x.^0.7,
0, 1) - 1 / 0.3, % 1 / 0.3 ðr integralens exakta vðrde
fel = -6.1687e-06
% analogt i f—ljande exempel
>> fel = quadl(@(x) 1 ./
x.^0.8,
0, 1) - 1 / 0.2
Warning: Minimum step size reached; singularity possible.
fel = -7.9354e-04
>> fel = quadl(@(x) 1 ./
x.^0.9,
0, 1) - 1 / 0.1
Warning: Minimum step size reached; singularity possible.
fel = -1.2600e-01
>> fel = quadl(@(x) 1 ./
x.^0.99, 0, 1) - 1 / 0.01
Warning: Minimum step size
reached; singularity possible.
fel = -6.4572e+01
F—r att klara av svÍra fall kan man
anvðnda variabelsubstitution eller partiell integration f—r
att bli av med singulariteten och fÍ en snðll integrand som quadl kan hantera. I
f—ljande uppgift fÍr du trðna pÍ denna teknik.
Integrationsintervallet ðr [0, 1] i samtliga tre fall.
|

|
a) Anvðnd partiell
integration f—ljd av quadl
f—r att approximera den bestðmda integralen av cos(x) /
x^0.9.
b) Anvðnd variabelsubstitution f—ljd av quadl f—r att approximera
den bestðmda integralen av cos(x) / x^0.9. Ledning: testa
ansatsen t = x^p dðr p ðr ett
reellt tal.
c) Frivillig:
Anvðnd variabelsubstitution f—ljd av quadl f—r att approximera
den bestðmda integralen av log(x) / (x^0.85 + x^0.9 +
x^0.95). Ledning: testa ansatsen t = x^p dðr p ðr ett
reellt tal.
|
|
|
Frivillig:
K—r (och studera) f—ljande
Matlabprogram. Titta pÍ
vðrdena och plotten. F—rklara vad som hðnder.
Ledning: Hur lurar men en kvadraturmetod (vilken som helst)? Vikter och
abscissor ðr givna (och fixa).
Skriv ett program f—r Simpson formel och berðkna en
approximation av integralens vðrde.
|
Lðnkarna i det f—rsta stycket beh—ver du bara lðsa
om intresse f—religger.
I f—ljande uppgift kommer du att ta fram formen pÍ ett bord.
Det ðr en typ av problem som jag har haft flera gÍnger.
Under de senaste Íren har vi tagit fram ett bord som haft formen
av en superellips, ett mellanting mellan en ellips och en rektangel.
Formen,
som
har anvðnts f—r fontðner och andra arkitektoniska
skapelser,
var
ett pÍfund av den danske mÍngsysslaren
Piet Hein,
en lðnk
till
(en del av en utmðrkt matematisk uppslagsbok), slutligen Wikipedias
artikel. Hðr kan Du se
ett
bord, Supercirkel av Bruno Mathsson
& Piet
Hein.
Eftersom som jag har lagt till ovanstÍende tvÍ
—vningar i Ír har jag f—renklat designen av bordet. I
Ír kommer du att bestðmma utseendet pÍ ett bord som
har formen av en epicykloid.
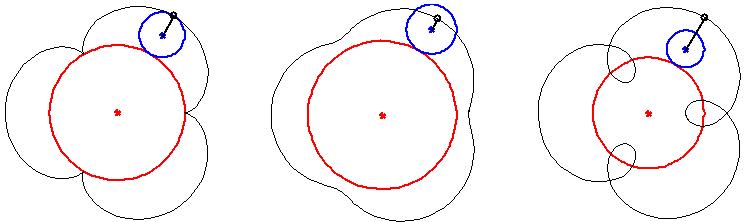
Vi kommer att generalisera bilderna frÍn lðnken till
vðnster, man talar om shortened eller lengthened epicykloid
(kanske f—rkortad, f—rlðngd pÍ svenska). Hðr
ðr tre epicykloider (de tre svarta kurvorna).
Den blÍ cirkeln rullar utmed den r—da, utan att slira. Den
svarta ringens vðg genererar kurvan. I nðsta bild har den
svarta punkten flyttats in utmed den blÍ cirkelns radie, r.
Ringen befinner sig pÍ avstÍndet 0.5 r frÍn den
blÍ cirkelns centrum (shortened). I den tredje bilden har ringen
flyttats ut och befinner sig pÍ avstÍndet 2 r frÍn
blÍ cirkelns centrum (lengthened). LÍt q vara graden av
f—rkortning eller f—rlðngning, sÍ i bilderna
ðr q = 1, q = 0.5 respektive q = 2. De tre bilderna ðr inte ritade i samma skala.
Om R ðr radien i den r—da cirkeln sÍ har kurvorna ovan
parameterframstðllningen:
R = 0.5
r = R /
3 (3 =
antalet utbuktningar)
c = (R + r) / r (= 3 + 1 = 4)
x(t) = c * r * cos(t) - q
* r
* cos(c * t)
y(t) = c * r * sin(t) - q
* r
* sin(c * t) dÍ 0 <= t <= 2 pi
|
|
Vi rÍkar ha en tjusig,
4.25 m lÍng, kantlist
till bordet. Anvðnd parameterframstðllningen ovan och
bestðm q sÍ att epicykloidens omkrets blir 4.25 m.
Rita ocksÍ upp formen pÍ det resulterande bordet (gl—m
inte axis equal, annars
fÍr bordet fel form).
Ledning: LÍt om(q)
vara bordets omkrets (epicykloidens kurvlðngd) som funktion av q.
DÍ bestÍr problemet i att l—sa ekvationen om(q) =
4.25. Anvðnd fsolve
f—r att l—sa ekvationen dðr du anvðnder quadl f—r att berðkna
kurvlðngden.
|
Sist en liten —vning som visar pÍ f—r- och nackdelar
med olika interpolationsf—rfaranden. Vi vill jðmf—ra linjðr
interpolation, splineinterpolation och sÍ kallad "shape-preserving"
kubisk Hermiteinterpolation f—r tvÍ dataserier. Shape-preserving
innebðr att om data ðr monotont (vðxande/avtagande pÍ ett delintervall)
sÍ ðr ðven interpolanten detta. En vanlig kubisk spline beh—ver inte
alls vara shape-preserving.
De tvÍ dataserierna, (t(k), y1(k)), k = 1, ...,, 8, respektive (t(k), y2(k)), k = 1, ...,, 8, skapar du sÍ hðr:
t = linspace(-2, 3, 8)';
y1 = exp(-t.^2);
y2 = [-1 -1 -1 -1 1 1 1 1]';
I den f—rsta dataserien har du en underliggande funktion, exp(-t^2), att jðmf—ra med nðr du studerar f—r- och nackdelar med de olika metoderna.
|
|
Anvðnd Matlabrutinen interp1
f—r att testa de tre interpolationsmetoderna. Skapa ett plotf—nster
vardera f—r de tvÍ dataserierna. I varje plotf—nster skall
datapunkterna och de tre interpolaterna ritas ut.
Datapunkterna skall ritas med ringar och interpolaterna skall ritas som
kurvor pÍ ett finare grid (anvðnd 100 punkter). Anvðnd slutligen legend-funktionen.
I
den f—rsta dataserien vet du vilken funktion vi f—rs—ker approximera.
Rðkna ut maximala avvikelsen (pÍ det finare gridet) f—r varje
interpolant.
Slutligen: drag slutsatser och analysera dina resultat"
|