Newtons metod
Det är enkelt att förstå hur Newtons metod fungerar för den skalära ekvationen f(x) = 0. Det är inte alls lika lätt att få någon känsla för ett system av ekvationer. Denna sida utgör ett försök att grafiskt illustrera fallet med två ekvationer, f(x, y) = 0 och g(x, y) = 0, i de två variablerna x och y.
Låt oss börja med att studera systemet av ekvationer på några olika sätt. För att göra resonemanget mera konkret antar vi att f(x, y) = x2 - y2 - 2 och g(x, y) = xy - 2. Man kan visa att de reella rötterna är ungefär x = 1.8 och y = 1.1 samt x = -1.8 och y = -1.1. Eftersom f(-x, -y) = f(x, y) (analogt för g) kommer vi enbart att studera problemet i första kvadranten av (x, y)-planet.
Några tolkningar av systemet:
Vilket synsätt man väljer är en smaksak och det kan kanske löna sig att växla synsätt.
Taylors formel
När vi härleder Newtons metod utnyttjar vi Taylorutveckling av en funktion av två variabler. Låt oss utveckla f(x, y) kring punkten (a, b):
f(a + h, b+ k) = f(a, b) + fx(a, b) h + fy(a, b) k + ...
där fx och fy får beteckna de partiella derivatorna. Låt oss fixera punkten (a, b) och definiera funktionen t(h, k) som alltså beror av h och k (som alltså får variera), genom:
t(h, k) = f(a, b) + fx(a, b) h + fy(a, b) k
Tripplarna (h, k, t(h, k)) definierar en yta i tre dimensioner (x svarar mot h, y mot k och z mot t(h, k)). Ytan är i själva verket tangentplanet till till funktionsytan, som ges av f(x, y), i punkten (x, y) = (a, b).
(h, k) anger hur mycket vi avlägsnar oss från (a, b). Till exempel är ju t(0, 0) = f(a, b). Om Du är en van ß-läsare så kanske Du inte tycker att det stämmer med formeln på sid. 214 (eller vad det nu kan vara i Din upplaga av tabellsamlingen). Där står att tangentplanet har framställningen:
z - f(a, b) = fx(a, b) (x - a) + fy(a, b) (y - b)
Eftersom h är avvikelsen från x = a, dvs. h svarar mot x - a i denna formel (analogt för k) så ser vi att det är samma uttryck.
Newtons metod
Vi står i punkten(xj, yj) och söker korrektioner h och k så att f(xj + h, yj + k) = 0 och g(xj + h, yj + k) = 0. Nu kan vi inte lösa detta problem direkt (det är ju lika svårt som ursprungsproblemet). Istället löser vi det linjäriserade problemet. Dvs. vi approximerar f, i en omgivning av punkten (xj, yj), med tangentplanet t_f(h, k). Vi approximerar analogt g med tangentplanet t_g(h, k) (jag har satt på _f och _g för att kunna skilja planen åt). Så:
t_f(h, k) = f(xj, yj) + fx(xj, yj) h + fy(xj, yj) k, t_g(h, k) = g(xj, yj) + gx(xj, yj) h + gy(xj, yj) k
Vi kan nu relativt enkelt lösa det linjära systemet: t_f(h, k) = 0 och t_g(h, k) = 0 som ger oss approximativa korrektioner h och k. Koefficientmatrisen blir alltså Jacobianen och högerledet är -[f(xj, yj), g(xj, yj)]T. Du kan nu tillämpa resonemanget ovan (de tre punkterna) på detta linjära problem. Så (om vi bortser från urartningsfall):
I följande bildsvit har jag försökt att illustrera ovanstående med hjälp av grafik.
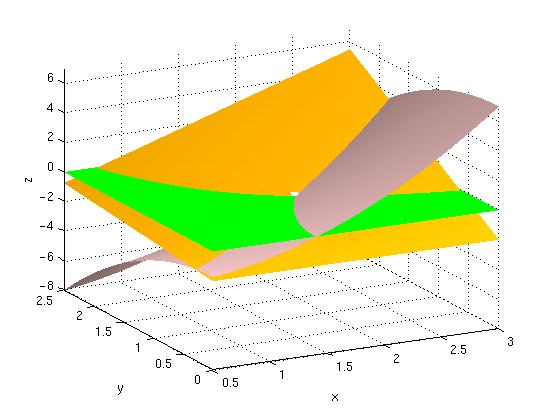
Den första bilden visar en del av funktionsytorna (f i rosaaktigt och g i gult). Den gröna ytan är en del av planet z = 0 (dvs. en del av x-y-planet). Roten är markerad med en vit fläck. Tänk igenom de tre olika synsätten när Du studerar figuren!
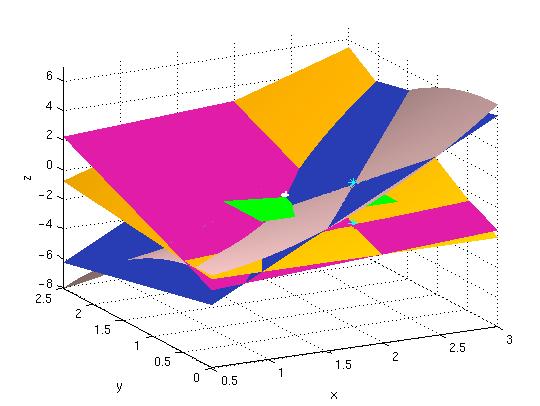
I följande bild har jag dessutom ritat ut delar av tangentplanen. Tangeringspunkterna (xj, yj, f(xj, yj)) respektive (xj, yj, g(xj, yj)) är markerade med cyanfärgade *. Planen är rödlila respektive mörkblå. Den vita fläcken är nu den approximativa lösningen.
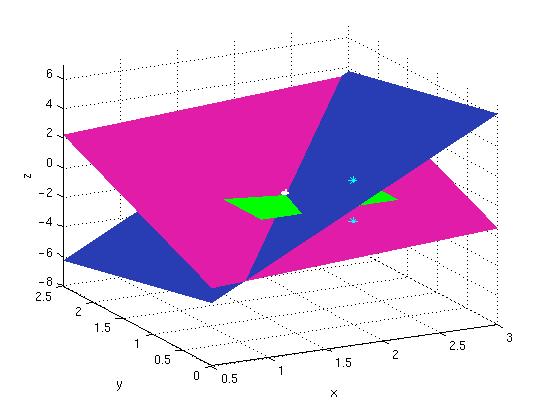
I nästa bild har jag tagit den föregående och avlägsnat funktionsytorna, för att få lite färre detaljer.
![]()